一、讲演竞赛要求及目的
I、讲演根据竞赛规程要求
以机器人焊接技能实际操作的试件为题,针对试件进行机器人焊接工艺分析,讲演试件的机器人焊接工艺对焊接质量的影响,并制定有效的解决措施提高焊接质量。针对试件的机器人焊接工艺,讲演优化提高试件的焊接质量、效率降低成本有效措施。
具体内容及要求如下:
①试件的机器人焊接工艺分析:
②影响试件机器人焊接质量的主要有哪些因素,如何制定有效的解决措施提高焊接质量:
③试件的机器人焊接工艺如何优化,有效提高焊接质量、效率降低成本:
④讲演必须用PPT展现:
⑤附上解决影响机器人焊接质量主要因素的有效措施、提高焊接质量的效果图。附上机器人焊接工艺的优化效果、有效真实数据。
2、讲演竞赛目的
引导选手运用专业基础理论知识,根据试件的要求,结合机器人焊接特点,制定装配工艺,设计工艺方案,在方案的编程中,运用焊接工艺的知识设置机器人的姿态、焊枪角度、焊层、迭用电源功能、焊接参数。根据设计方案,进行实施机器人工艺评定及优化.保障焊缝成形、内部焊透、提高焊接效率、降低成本,提高迭手的机器人焊接工艺水平,正确指导实操迭手赛前练习。
二、讲演竞赛主要存在问题
通过讲演现场及赛后根据选手提供的PPt进行了分析,选手普遍没有熟悉机器人的性能、特点及弧焊电源的性能、功能应用,同时也没有对试件进行机器人焊接工艺评定,缺乏机器人焊接工艺的实践经验,在讲演竞赛中主要存在以下问题
1、试件机器人焊接工艺分析及方案
(1)、组对工艺分析及方案;
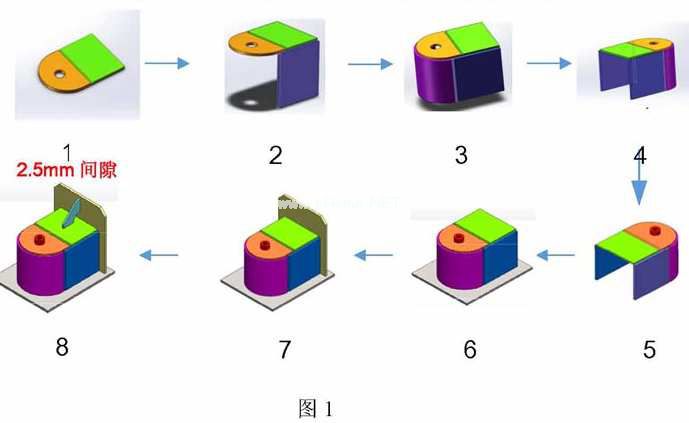
大部分选手的组对工艺分析及方案在表述中,没有明确选用装配基准,普遍按图1组对定位焊,不正确之处没有选好装配基准。
(2)机器人焊接工艺分析不到位
主要原因;选手普遍缺乏机器人焊接工艺实践经验;
1)焊接难点的工艺与编程分析
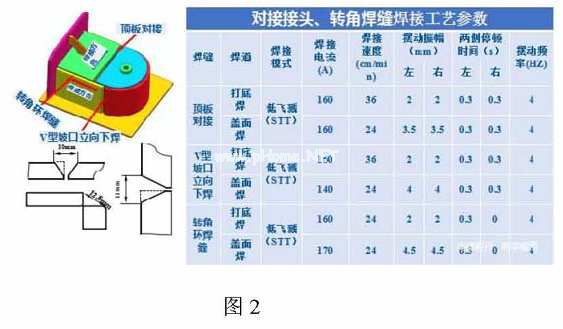
选手普遍都能正确分析到试件的立对接、立角底层焊 缝是焊接难点,但焊接难点的影响因素分析不到位,因此大部分选手在解决难点措施的表述中,采用不正确的“低飞溅从上往下焊”。见图2。
2)对弧焊电源的功能基本不分析
大部分选手没有对弧焊电源的功能的应用进行分析和研究,因此,在解决焊接难点的措施中,表述选用弧焊电源的功能不正确,例如:底板角焊缝应采用单脉冲或恒压, 但普遍选用低飞溅。见图3和4。
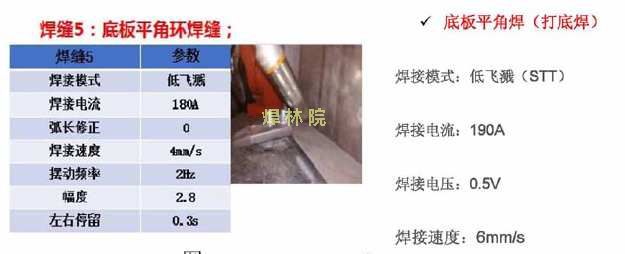
3)控制焊枪角度的有效措施
选手对竞赛用的机器人的性能及示教器功能了解不透,在工艺分析及有效措施表述中出现两种情况,所有焊缝焊接不标注焊枪角度(图5)或仅在角焊缝标注焊枪角度,没有注明选用角尺检测,在实施中不严格控制焊枪角度,明显影响焊接质量。
解决措施:
起弧接头处要错过0.5mm,保证接头熔合良好。
转角时,需要增大焊丝干伸长度至16mm,增大焊接电流10%,防止发生焊枪干涉同时获得较深的熔深。

2、试件机器人焊接工艺实施
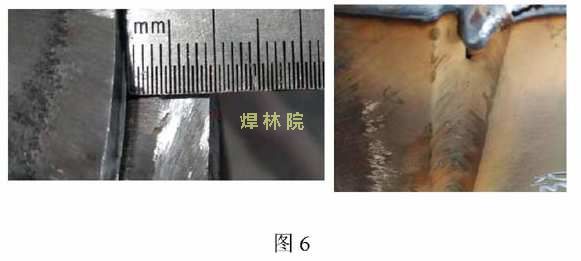
(1)盖板边缘与立板边缘角接头的组装。
试件盖板角接头是焊接其中的难点,由于分析不到位,实施表述中基本没有考虑组装控制尺寸,焊后影响焊缝外观尺寸及下塌。见图6。
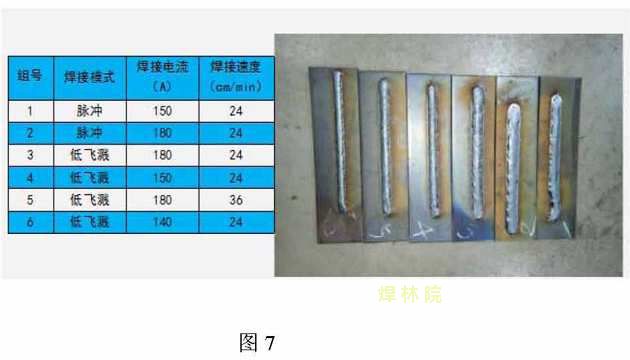
(2)难点的焊接工艺实施
难点的焊接工艺实施,必须要进行焊接工艺评定优化后确定,但从实施的工艺及选用的焊接参数可以了解到,选手只是做一些简单参数调试后确定的。因此,焊接难点的工艺分析及采取的措施,在实施表述中所列出的不是优化后焊接参数,是简单调试的焊接参数。见图7。
三、实操要求
1、选手实操要求
(1)根据大赛技术规程要求
1)熟悉掌握机器人焊接电源、送丝机、焊枪、保护气体、焊丝、线缆的安全、运行检查及维护。
2)熟悉掌握机器人焊接电源的性能及功能选用。
3)熟悉机器人焊接的安全操作及维护。
4)熟悉机器人的性能及示教器功能应用。
5)熟悉掌握机器人的TCP的校正;
6)能根据图样要求,采用手工焊进行试件组对。
7)根据图样要求,能进行机器人焊接工艺分析,确定影响焊接质量的关键的焊接轨迹点,并合理设置机器人姿态、焊枪角度,正确选用焊接参数,完成试件焊接。
8)提高机器人焊接的相关理论知识。
2、选手实操训练按大赛技术规程要求及目的
(1)选手集中培训
目的:培训选手熟悉机器人的性能、特点及示教器的使用。
培训选手熟悉弧焊电源的性能、功能的应用。
培训选手熟悉竞赛规程、评分标准及相关内容。
(2)选手后续培训
根据竞赛规程确定的比赛试件及要求进行训练。
四、实操竞赛
通过大赛现场及赛后试件分析,选手主要对装焊、装夹方向、焊接顺序、机器人弧焊电源的功能、温度、编程(运动轨迹、焊接轨迹、姿态、焊枪角度、焊接参数)、温度等因素,没有逐个认真分析,对机器人的性能特点及弧焊电源的性能、功能应用不够熟悉,以下是实操竞赛主要存在的问题
1、实操竞赛存在问题
(1)试件装配质量
1)试件装配:大部分选手的试件组对没有选用在底板划线定位装配,普遍采用上盖板对接定位焊--分别与两立板、半圆弧立板组对定位焊一与底板组对定位焊--一与立封板组对定位焊,同i讨没有测量盖板边缘与立板边缘的尺寸见图8,焊后造成焊脚尺寸不一致或焊缝下塌等缺陷见图9。
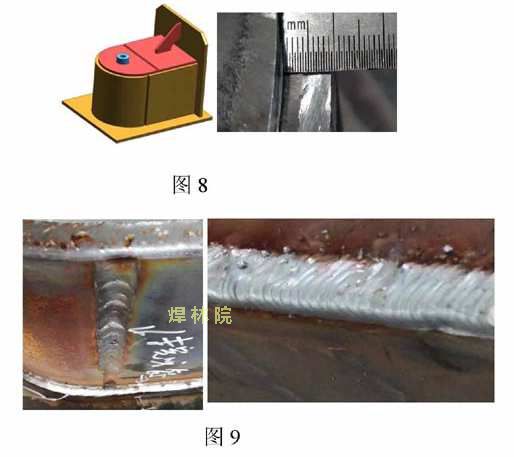
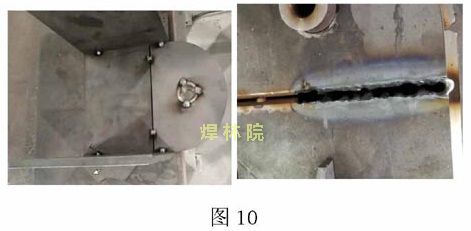
2)定位焊缝:部分选手定位焊缝过短或未熔合,焊接过程产生应力将定位焊缝拉裂,装配间隙增大,引起焊穿等缺陷见图10。
(2)示教焊枪角度
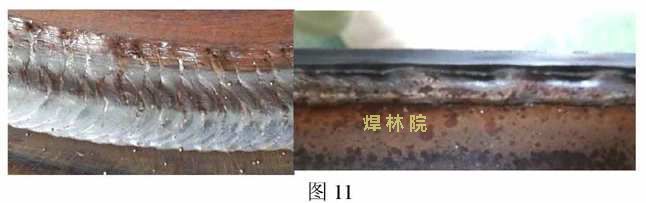
大部分选手示教焊枪角度普遍目测,目测示教焊枪角度不准确,产生角焊缝偏向,焊后焊脚尺寸不合格。见图11。
(3)弧焊电源功能的选用
大部分选手选用电源功能不正确;普遍选用低飞溅立向下焊立对接、立角焊缝,造成焊缝底部产生未熔合,是引起水压试验不合格的主要原因。见图12。

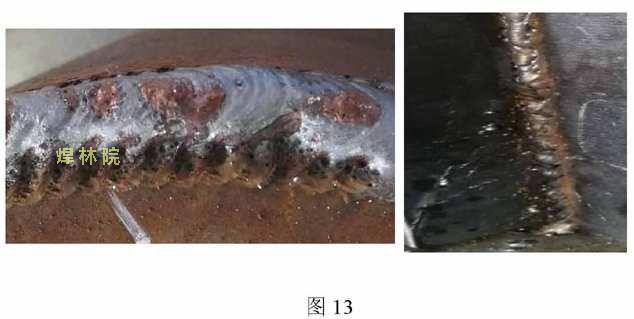
(4)焊接参数
部分选手设定焊接电流、焊速等不匹配,焊缝质量不合格。见图13。